



Self-driving cars, or autonomous vehicles, have been the talk of the automotive industry for a long time. The prospect of having a car that can drive itself without human intervention is both fascinating and intimidating at the same time. How do self-driving cars work? In this article, we will explore the technologies behind self-driving cars and the evolution of autonomous driving from the early attempts to the present day.
The Evolution of Self-Driving Cars
Early Attempts at Autonomous Vehicles
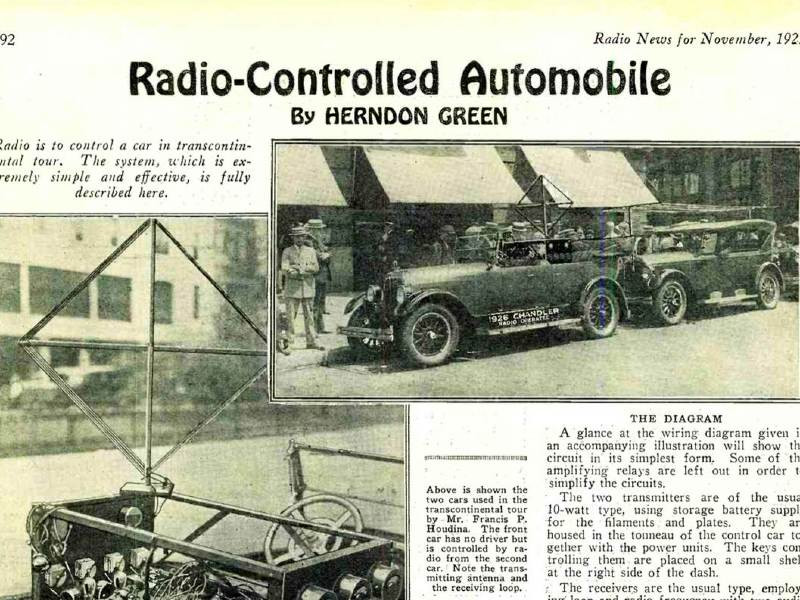
The idea of autonomous vehicles dates back to the 1920s when the first self-driving car, the "American Wonder," was introduced. However, it wasn't until the 1980s when the first autonomous vehicle was developed with the use of computer vision and artificial intelligence (AI). The Navlab project, developed by Carnegie Mellon University, was one of the earliest attempts at autonomous vehicles. It featured a modified van with cameras and sensors to navigate the streets of Pittsburgh.
Since then, the development of self-driving cars has come a long way. The technology has advanced to the point where autonomous vehicles can now operate on public roads with a high degree of safety and reliability. However, there is still much work to be done before self-driving cars become a common sight on our streets.
The Role of Artificial Intelligence and Machine Learning
Today, artificial intelligence and machine learning play a critical role in the development of self-driving cars. AI algorithms enable autonomous vehicles to learn from their environment and adapt to changing road conditions. The most common AI techniques used in self-driving cars include deep learning, reinforcement learning, and computer vision.
Deep learning is a type of AI that uses neural networks to learn from large amounts of data. This technique is used to teach self-driving cars how to recognize objects such as other vehicles, pedestrians, and traffic lights. Reinforcement learning is another type of AI that is used to teach self-driving cars how to make decisions based on their environment. This technique involves rewarding the car for making good decisions and punishing it for making bad ones.
Computer vision is also an important part of self-driving car technology. It allows the car to "see" its environment using cameras and sensors. This information is then used to create a 3D map of the car's surroundings, which it can use to navigate the roads.

Key Milestones in Self-Driving Car Development
Over the years, there have been several key milestones in the development of self-driving cars. In 2004, the Defense Advanced Research Projects Agency (DARPA) hosted the first Grand Challenge, which paved the way for the development of autonomous driving technology. The challenge involved a 142-mile course through the Mojave Desert, and the winning vehicle was able to complete the course in just under 7 hours.
Since then, there have been several other Grand Challenges, as well as numerous other competitions and tests of autonomous driving technology. Google's self-driving car project, now known as Waymo, was launched in 2009 and has since become one of the most prominent players in the field. Waymo's vehicles have driven over 20 million miles on public roads, and the company plans to launch a commercial self-driving taxi service in the near future.
Other companies, such as Tesla, Uber, and Lyft, are also investing heavily in self-driving car technology. Tesla's Autopilot system is already available on its Model S, Model X, and Model 3 vehicles, and the company plans to release a fully autonomous vehicle in the near future. Uber and Lyft are also working on their own autonomous driving technology, with the goal of eventually offering self-driving rides to their customers.
Overall, the development of self-driving cars has come a long way in a relatively short amount of time. While there are still many challenges to overcome, the potential benefits of autonomous driving technology are enormous. Self-driving cars have the potential to reduce traffic accidents, improve traffic flow, and make transportation more accessible to people with disabilities or other mobility issues. It will be exciting to see what the future holds for this rapidly evolving technology.
.jpeg)
The Technology Behind Self-Driving Cars
Self-driving cars are the future of transportation, and the technology behind them is advancing rapidly. These vehicles use a combination of sensors, cameras, GPS, mapping technology, and V2X communication to navigate the roads safely and efficiently.
Sensors and Cameras
The most critical technology behind self-driving cars is the sensors and cameras that enable them to "see" the world around them. Autonomous vehicles use a variety of sensors, including radar, lidar, and ultrasonic sensors, to detect objects in their environment. These sensors work together to create a detailed picture of the car's surroundings, allowing it to make informed decisions about how to navigate the roads.
Cameras provide additional visual information, such as lane markings and traffic signals, which help the car navigate the roads. These cameras are incredibly advanced, using high-resolution lenses and image recognition software to identify and interpret the world around them.

Lidar and Radar Systems
Lidar, or light detection and ranging, is a remote sensing method that uses laser light to create high-resolution maps of the environment. This technology works by sending out laser pulses and measuring the time it takes for them to bounce back. The resulting data is used to create a 3D map of the car's surroundings, which is then used to navigate the roads.
Radar technology, which sends out radio waves and measures the time it takes for them to bounce back, is used to detect and track objects. This technology is particularly useful in low visibility conditions, such as heavy rain or fog, where cameras may not be able to see clearly.
These systems work together to provide the car with a 360-degree view of its surroundings, allowing it to detect and avoid potential obstacles and hazards.
GPS and Mapping Technology
Global positioning system (GPS) technology is used in self-driving cars to locate their position on the map accurately. This technology works by using a network of satellites to triangulate the car's position on the earth's surface. This information is then used to create a detailed map of the car's environment.
Mapping technology is crucial for self-driving cars because it enables the car to follow routes and avoid obstacles. These maps are incredibly detailed, providing information about road conditions, speed limits, and the location of other vehicles on the road.
Vehicle-to-Everything (V2X) Communication
Vehicle-to-everything (V2X) communication is a networking technology that enables self-driving cars to communicate with other cars, traffic lights, and road infrastructure. This technology allows the vehicles to share information about traffic conditions, road hazards, and other essential data.
This communication enables self-driving cars to make real-time decisions and avoid potential accidents. For example, if a car ahead of the autonomous vehicle suddenly brakes, the V2X system would alert the self-driving car, allowing it to react quickly and avoid a collision.

The Different Levels of Vehicle Autonomy
As technology continues to advance, the world of transportation is rapidly changing. One of the most exciting developments in recent years has been the rise of autonomous vehicles. These vehicles have the ability to drive themselves, without the need for a human driver. However, not all autonomous vehicles are created equal. There are different levels of autonomy, each with its own set of capabilities and limitations.
Level 0: No Automation
The first level of vehicle autonomy involves human drivers controlling the car at all times. This is the traditional way of driving, where the driver is responsible for all aspects of operating the vehicle. While this level of autonomy may seem outdated, it is still the most common form of transportation on the road today.
Level 1: Driver Assistance
The second level of autonomy includes driver assistance features, such as adaptive cruise control and lane departure warning. These features are designed to make driving easier and safer for the driver. Adaptive cruise control, for example, automatically adjusts the vehicle's speed to maintain a safe distance from the car in front of it. Lane departure warning alerts the driver if the vehicle begins to drift out of its lane. While these features are helpful, the driver is still responsible for controlling the vehicle.

Level 2: Partial Automation
Level 2 automation involves features like automated braking and steering. These features are more advanced than those found in Level 1, but the driver must remain attentive and be prepared to take control of the car at any moment. For example, if the vehicle encounters a situation that it cannot handle, the driver must be ready to take over. While Level 2 vehicles are more capable than Level 1 vehicles, they still require significant input from the driver.
Level 3: Conditional Automation
At Level 3, the car can operate without human intervention under certain conditions. For example, a Level 3 vehicle may be able to drive itself on the highway, but the driver must still be ready to take control when needed. This level of autonomy is more advanced than Levels 1 and 2, but it still requires significant input from the driver.

Level 4: High Automation
Level 4 autonomous vehicles can drive themselves under most circumstances. However, human control may still be necessary in some situations. For example, a Level 4 vehicle may be able to drive itself in normal traffic conditions, but it may require human intervention in extreme weather conditions. While Level 4 vehicles are highly capable, they are not yet fully autonomous.
Level 5: Full Automation
The highest level of autonomy involves fully autonomous vehicles that don't require any human intervention. They can drive themselves in all situations, from rush hour traffic to off-road adventures. While Level 5 vehicles are not yet widely available, they represent the future of transportation. With fully autonomous vehicles, the possibilities are endless.

Conclusion
Self-driving cars are set to revolutionize the automotive industry, with the potential to save lives, reduce traffic congestion, and improve mobility for seniors and people with disabilities. The technology behind these cars is complex, involving AI, sensors, and communication systems. However, there is still a long way to go before fully autonomous vehicles become a reality on our roads.




